Delay Tolerant Network for Autonomous Robotic Vehicle Charging
Overview
For my Senior Design Project at Tufts University, I teamed up with Tolga Zeybek and Gerad Denoyer in the Tufts Wireless Labs. We created a robot that could autonomously find a charging station when it was running low on batteries using a Delay Tolerant Network. Our goal was to have a robot go by a charging station and relay the coordinates of the station to another bot that was running low on batteries. Then the robot running low on batteries would navigate to the charging station to recharge itself.
The bots communicate with each other using a Delay Tolerant Netowrk (DTN). A Delay Tolerant Network is a communication system that does not rely on modern communication systems such as wifi, 4G, or cell networks. Instead, whenever a node of a DTN comes within range of another node, the two swap relevant data with each other. In this way information can be spread throughout the network. In our system, we created a few different types of nodes. The charging station nodes are placed in charging stations and contain the GPS location of the station. The vehicular nodes are placed in robotic vehicles and are used to relay the charging station coordinates. Information nodes are placed along the roadside to relay roadside hazards and general road conditions. The graduate students of Tufts Wireless Labs also developped gateway nodes to send the information from the DTN network to the general internet.
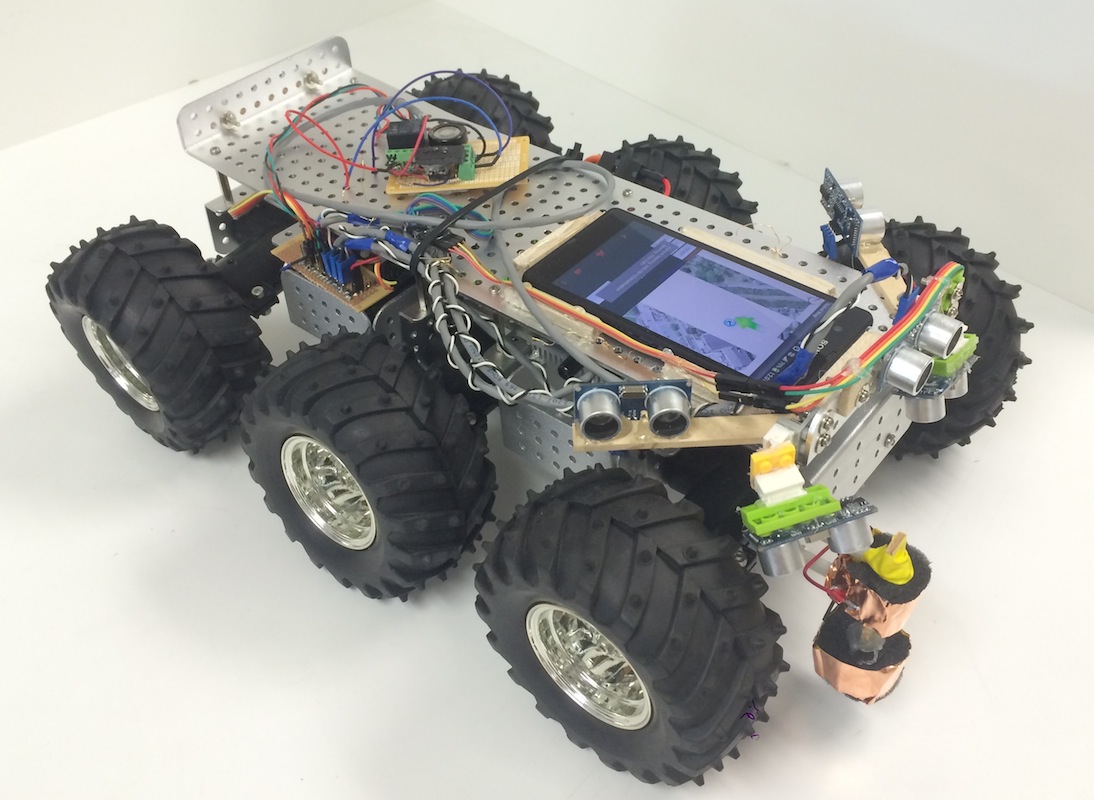
Figure 1: Picture of Autonomous Robotic Vehicle
Once a robot that is running low on batteries obtains the GPS coordinates of a charging station it will calculate the shortest path to the station and begin driving in that direction. The robot uses ultrasonic sensors placed around the robot and a navigation algorithm to prevent the robot from running into objects as it navigates to its final destination. Once the robot gets within 15 feet of the charging station, it stops relying on GPS and uses an image detection algorith to finalize navigation. This process is shown in Video 1 below. In the video, the robot can be seen rotating around as it looks for the identifying pattern on the charging station. Once the image detection algorithm sees the pattern, the bot rotates until the pattern is straight ahead. Then the bot communicates with the station through the DTN to activate the station (in the video this is shown by having the red LED's turn on to indicate that the station is active and the charging connection is hot). Finally, the bot begins driving forward until the bot contacts the charging station and charging begins. Once the robot is sufficiently charged, it backs away from the charging station, communicates via DTN to turn the charging station off, and continues on its original destination.